BrickieBots 2.0: construire des murs grâce aux robots
SEPT. 2024
BrickieBots 2.0 développe des robots autonomes pour la construction de murs
BrickieBots 2.0 est un projet collaboratif soutenu par Innoviris et FARI, auquel participent différentes institutions de recherche telles que le département SAAS de l’ULB, le département R&MM de la VUB, le département ETRO de la VUB et le partenaire industriel BESIX. L’objectif de ce projet est de contribuer au développement d’un nouveau concept robotique capable de réaliser de manière autonome la construction d’un mur avec de gros blocs.
Collaboration multi-robots
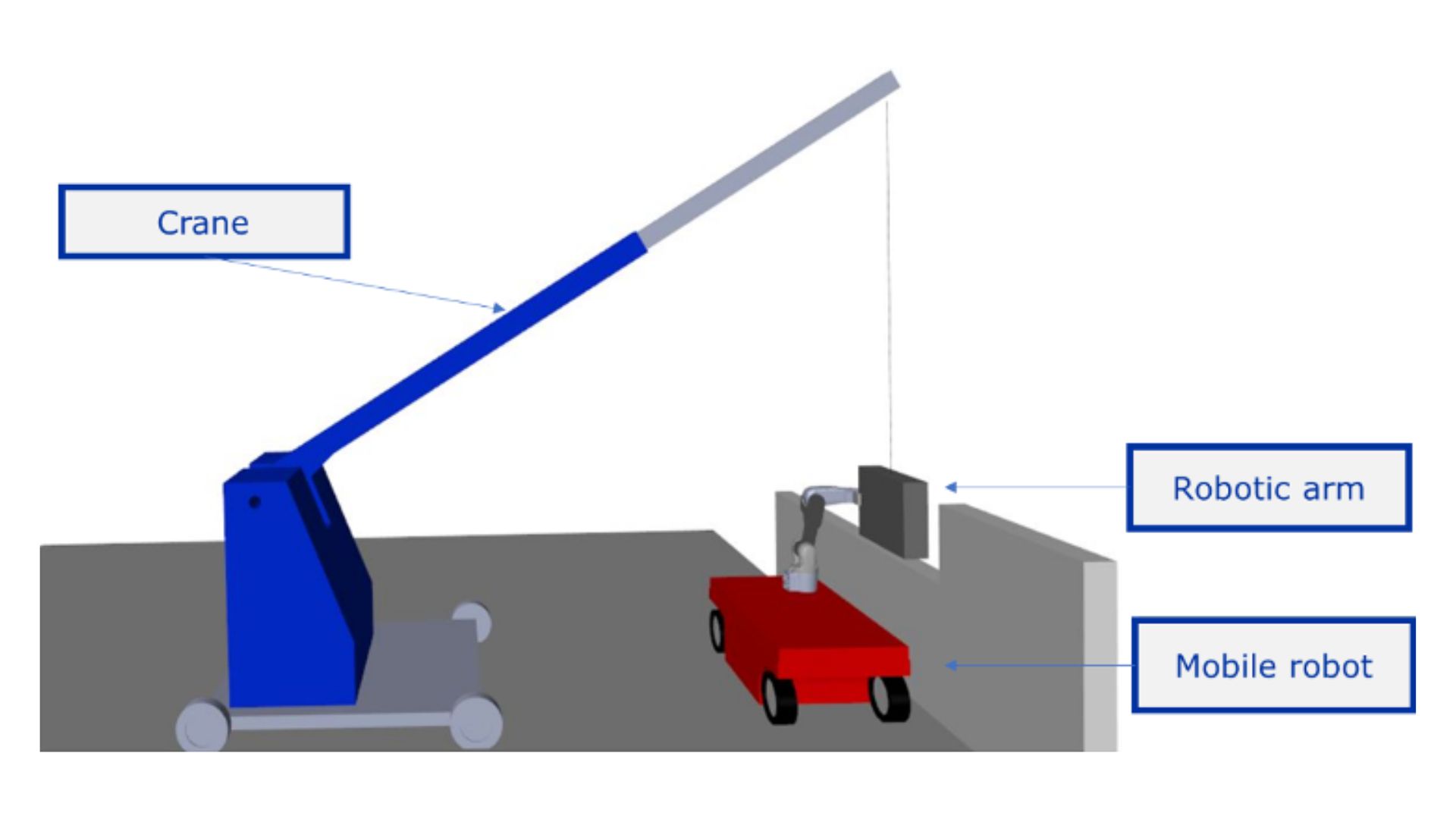
La solution projetée se compose d’une grue et d’un bras robotique montés sur un robot mobile (voir Fig.1). Lorsque la grue soulève les blocs, le bras robotisé les saisit et les place à l’endroit prévu. Cette approche multi-robots permet de combiner les différentes compétences de ces deux robots. Par exemple, la grue peut manipuler de lourdes charges mais n’est pas capable de placer les blocs avec précision, tandis que le bras robotique est précis mais ne peut pas supporter le poids des blocs. Par conséquent, la combinaison de ces deux systèmes robotiques permet d’obtenir un système capable de manipuler des blocs lourds et de les placer avec précision.
Objectifs du projet
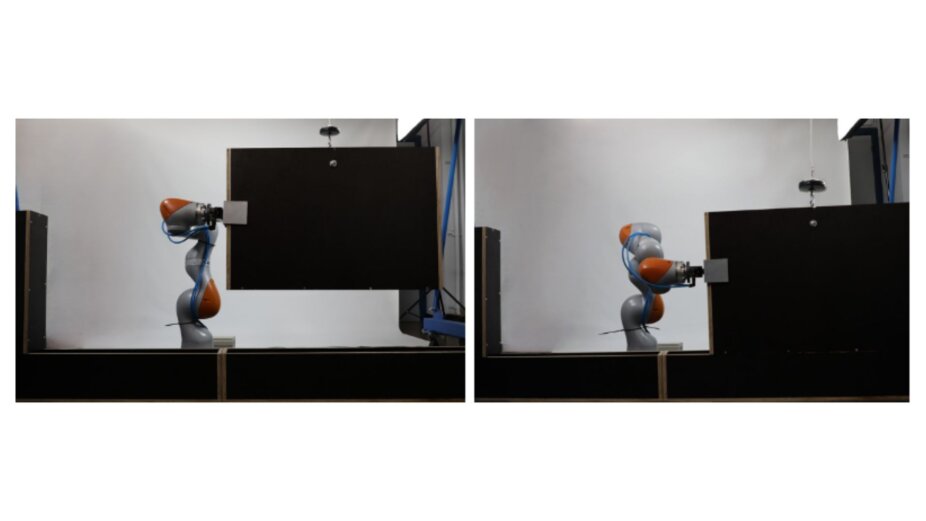
Ce projet a trois objectifs principaux. Premièrement, développer la suite sensorielle du robot mobile sur lequel le bras robotique sera monté, ainsi que les algorithmes de localisation afin de fournir au système robotique une estimation précise de sa position dans l’environnement de construction. Cela permet au bras robotique de naviguer le long du mur qui est en train d’être construit. Deuxièmement, développer des mécanismes de contrôle avancés qui assureront une bonne coordination entre la grue et le bras robotique sans endommager ce dernier, car le robot seul ne peut pas supporter des charges aussi lourdes et peut être facilement endommagé. En d’autres termes, il s’agit de s’assurer que la grue s’occupe de la charge lourde et que le bras du robot n’est utilisé que comme une unité précise pour placer les blocs. Troisièmement, poursuivre le développement du prototype (Fig.2) avec les nouvelles extensions développées dans le cadre du projet.
Impact sur la sécurité et l’efficacité de la construction
Ce projet vise à créer un environnement de travail plus sûr pour les maçons, grâce à ce système robotisé qui contribuera à réduire le risque d’accidents sur le lieu de travail. En outre, l’utilisation du système robotique projeté réduira la durée des travaux de construction, ce qui aura un impact positif sur le bien-être de la société. Cette réduction du temps a également un impact économique potentiel élevé puisqu’elle augmente l’efficacité et la productivité des chantiers de construction. Enfin, ce projet vise à combler un créneau inoccupé du marché, étant donné qu’il n’existe actuellement aucune machine capable d’effectuer ces tâches de manière économiquement viable.
La validation expérimentale de ce projet sera d’abord réalisée en laboratoire, puis sur des chantiers de construction.
Partenaires :
- Service d’Automatique et d’Analyse des Systèmes (SAAS), ULB
-
Department of Robotics and MultiBody Mechanics (R&MM), VUB
-
Department of Electronics and Informatics (ETRO), VUB
- BESIX
Ce projet de recherche a été soutenu par Innoviris et FARI – AI for the Common Good Institute (ULB-VUB), financé par l’Union européenne, avec le soutien de la Région de Bruxelles-Capitale (Innoviris et Paradigm).




Partager
Autres projets