Erreur sur le délégué artificiel : un moindre mal dans les dilemmes à risque collectif
AOÛT 2024
Résumé
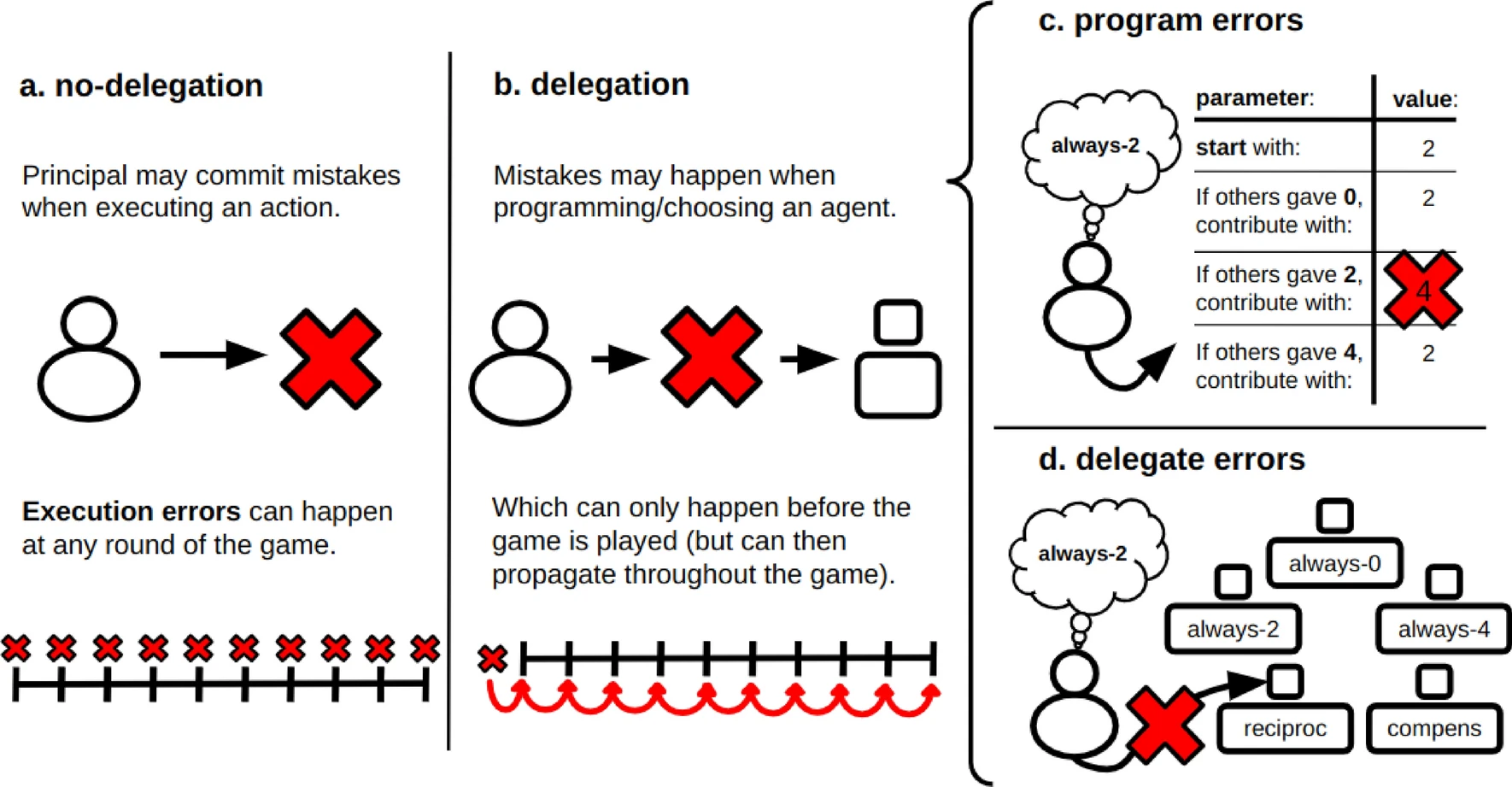
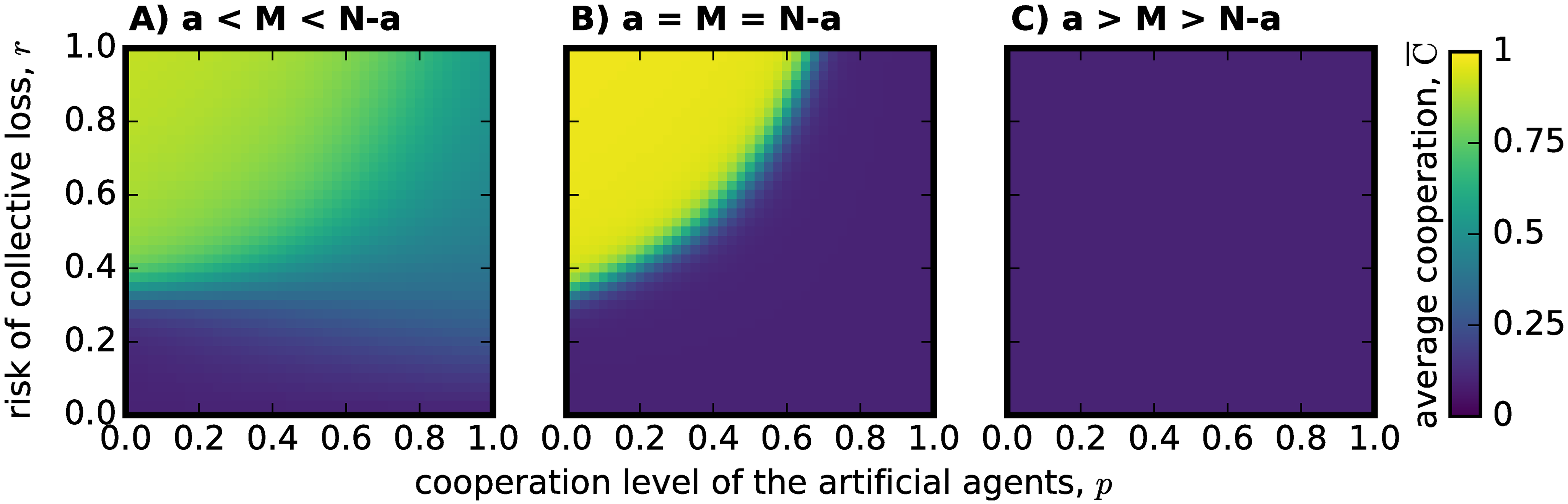
Alors que les agents artificiels autonomes sont censés exécuter parfaitement les stratégies pour lesquelles ils sont programmés, les humains qui les conçoivent peuvent commettre des erreurs. Ces erreurs peuvent entraîner un décalage entre les objectifs visés par les humains et le comportement observé de leurs agents, ce qui constitue un problème d’alignement des valeurs. Un tel problème d’alignement peut avoir des conséquences particulièrement importantes lorsque ces systèmes autonomes sont utilisés dans des contextes sociaux qui impliquent une certaine forme de risque collectif. Au moyen d’un modèle théorique de jeu évolutionnaire, nous étudions si des erreurs dans la configuration des agents artificiels modifient l’issue d’un dilemme de risque collectif, par rapport à un scénario sans délégation. La délégation se distingue ici de la non-délégation simplement par le moment où l’erreur se produit : soit lors de la programmation/du choix de l’agent (dans le cas de la délégation), soit lors de l’exécution des actions à chaque tour du jeu (dans le cas de la non-délégation). Nous constatons que, si les erreurs diminuent le taux de réussite, il est préférable de déléguer et de s’engager dans une stratégie quelque peu imparfaite, parfaitement exécutée par un agent autonome, que de commettre directement des erreurs d’exécution. Notre modèle montre également qu’à long terme, les stratégies de délégation devraient être favorisées par rapport à l’absence de délégation, si nous en avons le choix.
Auteurs : Inês Terrucha, Elias Fernández Domingos, Pieter Simoens & Tom Lenaerts

Contributeurs

Partager
Autres publications



Date
MARS 2024
Chercheurs
Date
MARS 2024
Chercheurs

Journal Article
Assessing Responsibility in Digital Health Solutions that operate with or without AI - 3 Phase Mixed Methods Study
Date
AVR. 2024
Chercheurs