De FARI Conference vindt plaats op 17 en 18 november in Brussel, ontdek meer.
Een initiatief van
Ondersteund door

BrickieBots 2.0: muren bouwen met robots
SEP. 2024
BrickieBots 2.0 ontwikkelt autonome robots die muren bouwen
BrickieBots 2.0 is een samenwerkingsproject ondersteund door Innoviris en FARI, waarbij verschillende onderzoeksinstellingen betrokken zijn, zoals de SAAS-afdeling van de ULB, de R & MM-afdeling van de VUB, de ETRO-afdeling van de VUB en de industriële partner BESIX. Het doel van dit project is om bij te dragen aan de ontwikkeling van een nieuw robotconcept dat in staat is om zelfstandig een muur met grote blokken te bouwen.
Multi-robot samenwerking
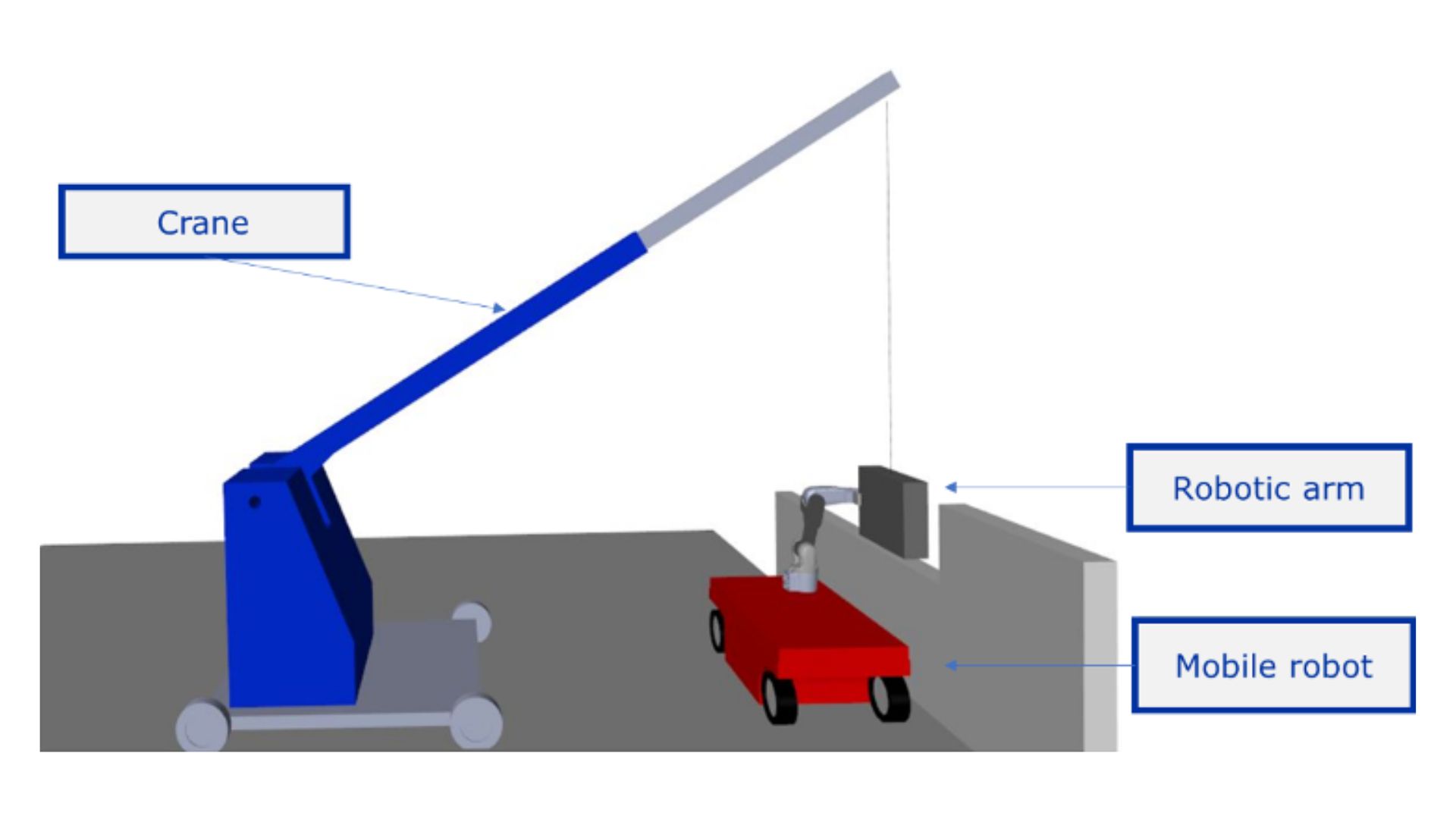
De geprojecteerde oplossing bestaat uit een kraan en een robotarm gemonteerd op een mobiele robot (zie figuur 1). Wanneer de kraan de blokken optilt, grijpt de robotarm ze vast en plaatst ze op de aangegeven positie. Deze multi-robot benadering maakt het mogelijk om de verschillende vaardigheden van deze twee robots te combineren. De kraan kan bijvoorbeeld zware lasten aan, maar kan blokken niet nauwkeurig plaatsen, terwijl de robotarm nauwkeurig is, maar het gewicht van de blokken niet kan dragen. Daarom resulteert de combinatie van deze twee robotsystemen in een systeem dat zware blokken kan verwerken en nauwkeurig kan plaatsen.
Projectdoelstellingen
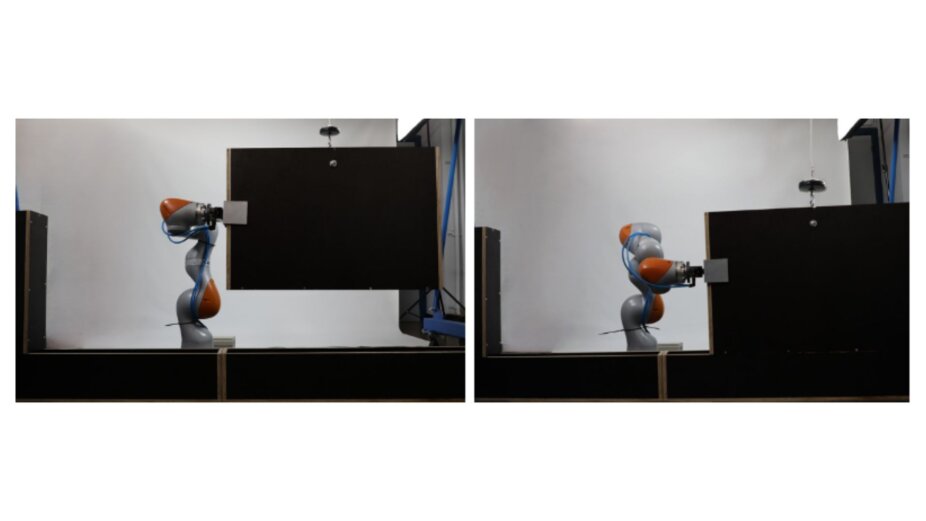
Dit project heeft drie hoofddoelstellingen. Ontwikkel eerst de sensorische suite van de mobiele robot waarop de robotarm zal worden gemonteerd, evenals de lokalisatiealgoritmen om het robotsysteem een nauwkeurige schatting te geven van zijn positie in de bouwomgeving. Hierdoor kan de robotarm langs de gebouwde muur navigeren. Ten tweede, geavanceerde controlemechanismen ontwikkelen die zorgen voor een goede coördinatie tussen de kraan en de robotarm zonder deze laatste te beschadigen, aangezien de robot alleen zulke zware lasten niet kan weerstaan en gemakkelijk kan worden beschadigd. Het gaat er met andere woorden om ervoor te zorgen dat de kraan de zware belasting afhandelt en dat de robotarm alleen wordt gebruikt als een precieze eenheid voor het plaatsen van de blokken. Ten derde, om de ontwikkeling van het prototype (figuur 2) voort te zetten met de nieuwe extensies die als onderdeel van het project zijn ontwikkeld.
Impact op veiligheid en efficiëntie van de constructie
Dit project heeft tot doel een veiliger werkomgeving voor metselaars te creëren dankzij dit robotsysteem dat het risico op ongevallen op de werkplek zal helpen verminderen. Bovendien zal het gebruik van het voorgestelde robotsysteem de bouwtijd verkorten, wat een positieve impact zal hebben op het welzijn van de samenleving. Deze tijdsvermindering heeft ook een grote potentiële economische impact omdat het de efficiëntie en productiviteit van bouwplaatsen verhoogt. Ten slotte wil dit project een onbezette marktniche vullen, aangezien er momenteel geen machine is die deze taken op een economisch levensvatbare manier kan uitvoeren. De experimentele validatie van dit project zal eerst worden uitgevoerd in een laboratorium en vervolgens op bouwplaatsen.
Partners:
- Service d’Automatique et d’Analyse des Systèmes (SAAS), ULB
-
Department of Robotics and MultiBody Mechanics (R&MM), VUB
-
Department of Electronics and Informatics (ETRO), VUB
- BESIX
Dit onderzoeksproject werd ondersteund door Innoviris en FARI – AI for the Common Good Institute (ULB-VUB), gefinancierd door de Europese Unie, met steun van het Brussels Hoofdstedelijk Gewest (Innoviris en Paradigm).




Delen
Andere projecten