The FARI Conference returns on 17 and 18 November in Brussels, find out more.
An Initiative of
Supported by

BrickieBots 2.0: building walls with robots
SEP 2024
BrickieBots 2.0 develops autonomous robots for wall construction
BrickieBots 2.0 is a collaborative project supported by Innoviris and FARI, where different research institutions are involved such as the SAAS department at ULB, the R&MM department at VUB, the ETRO department at VUB, and the industrial partner–BESIX. The objective of this project is to contribute to the development of a novel robotic concept able to autonomously carry out the construction of a wall with large blocks.
Multi-Robot Collaboration
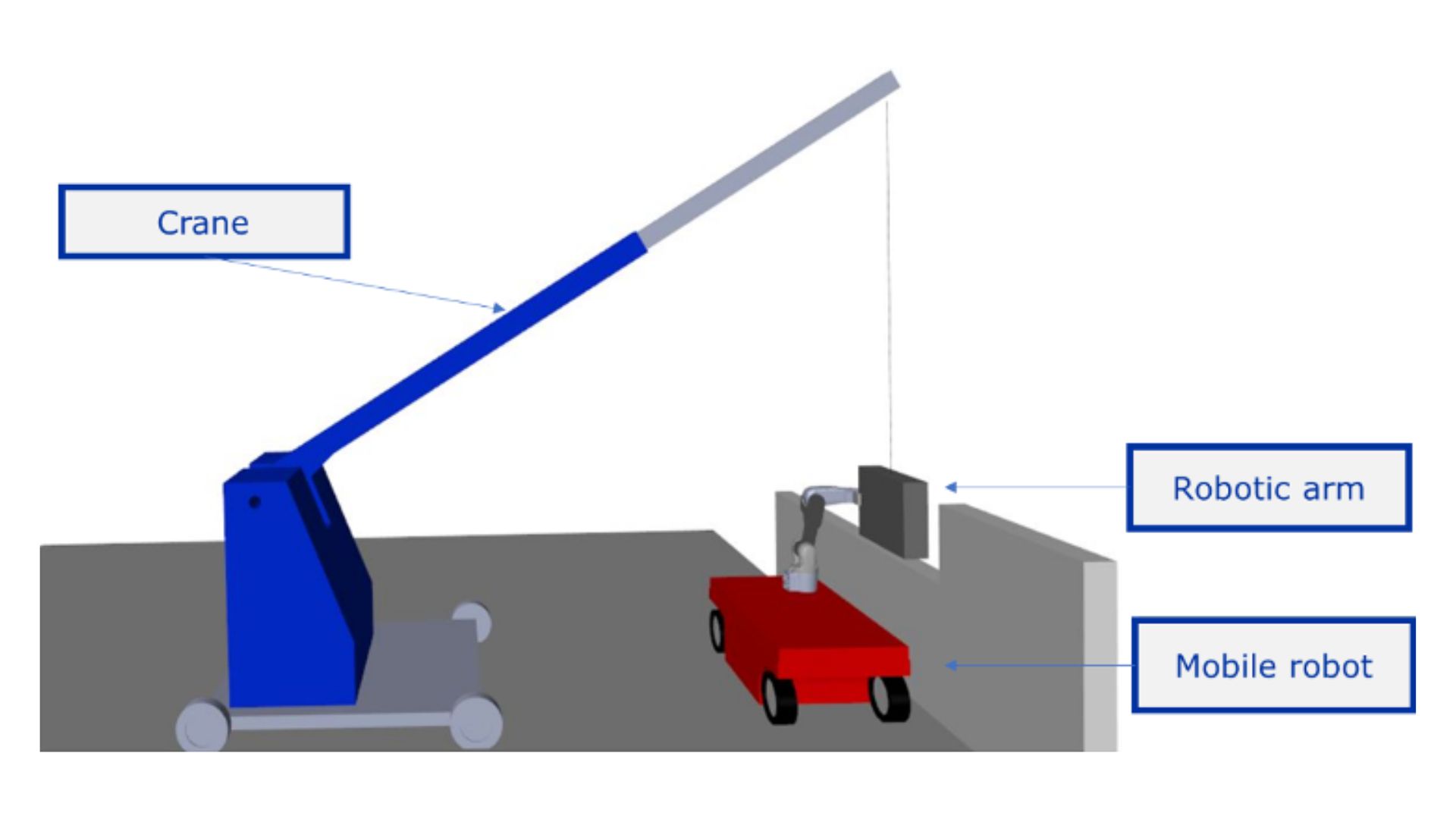
The projected solution is comprised of a crane and a robotic arm mounted on a mobile robot, refer to Fig.1. While the crane hoists the blocks, the robotic arm grabsthe block and places them in their projected locations. This multi-robot approach allows to combine the different capabilities of these two different robots. For instance, the crane can handle heavy loads but is not capable to precisely place the blocks, while, on the other hand, the robot arm is precise but cannot handle the block’s weight. Therefore, combining these two robot systems leads to a system that can handle heavy blocks and precisely place them.
Objectives of the project
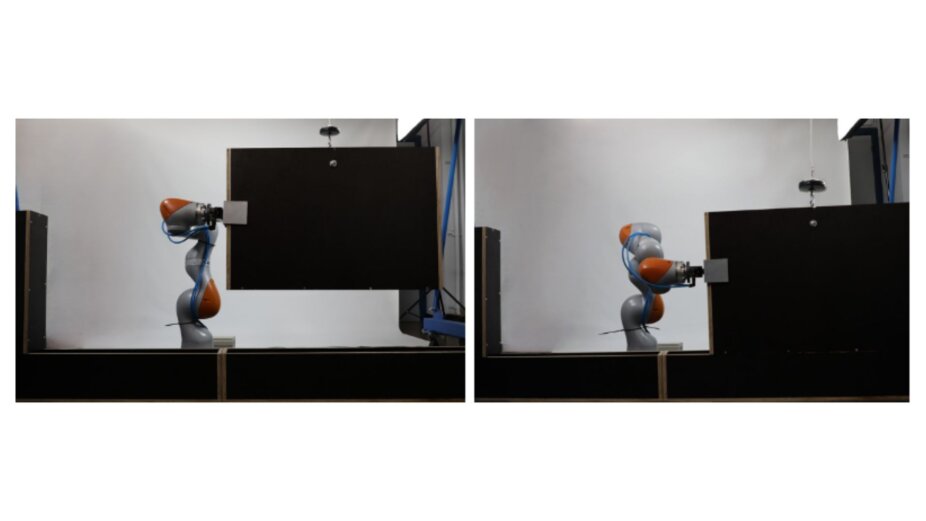
There are three main goals of this project. First, to develop the sensory suite for the mobile robot on which the robot arm will be mounted, and the localization algorithms to provide the robotic system with an accurate estimation of its location in the construction environment. This allows the robotic arm to navigate along the wall that is being built. Second, to develop advanced control laws that will ensure a proper coordination between the crane and the robot arm that will not damage the robot arm, since alone the robot cannot handle such heavy loads and can be easily damaged. In other words, to ensure that the crane takes care of the heavy load and the robot arm is only used as a precise unit to place the blocks. Third, to further develop the prototype (Fig.2) with the newly developed extensions in the project.
Impact on Construction Safety and Efficiency
This project aims to achieve a safer working environment for the masons, as this robotic system can aid in reducing the risk of workplace accidents. Furthermore, the use of the projected robotic system will reduce the duration of construction works, which positively impacts the societal well-being. This reduction in time also has a high potential economic impact since it increases the efficiency and productivity of construction sites. Lastly, this project aims to fill an unoccupied market niche, as there are not any machines that can carry out these tasks in an economically viable way at the current time.
The experimental validation of this project will firstly be carried out in a lab environment and thereafter in construction sites.
Partners:
- Service d’Automatique et d’Analyse des Systèmes (SAAS), ULB
-
Department of Robotics and MultiBody Mechanics (R&MM), VUB
-
Department of Electronics and Informatics (ETRO), VUB
- BESIX
This research project was supported by Innoviris and FARI – AI for the Common Good Institute (ULB-VUB), financed by the European Union, with the support of the Brussels Capital Region (Innoviris and Paradigm).




Share
Other projects